





Variety of Applications is allowed by Open Design and highly reconfigurable nature of the camera:
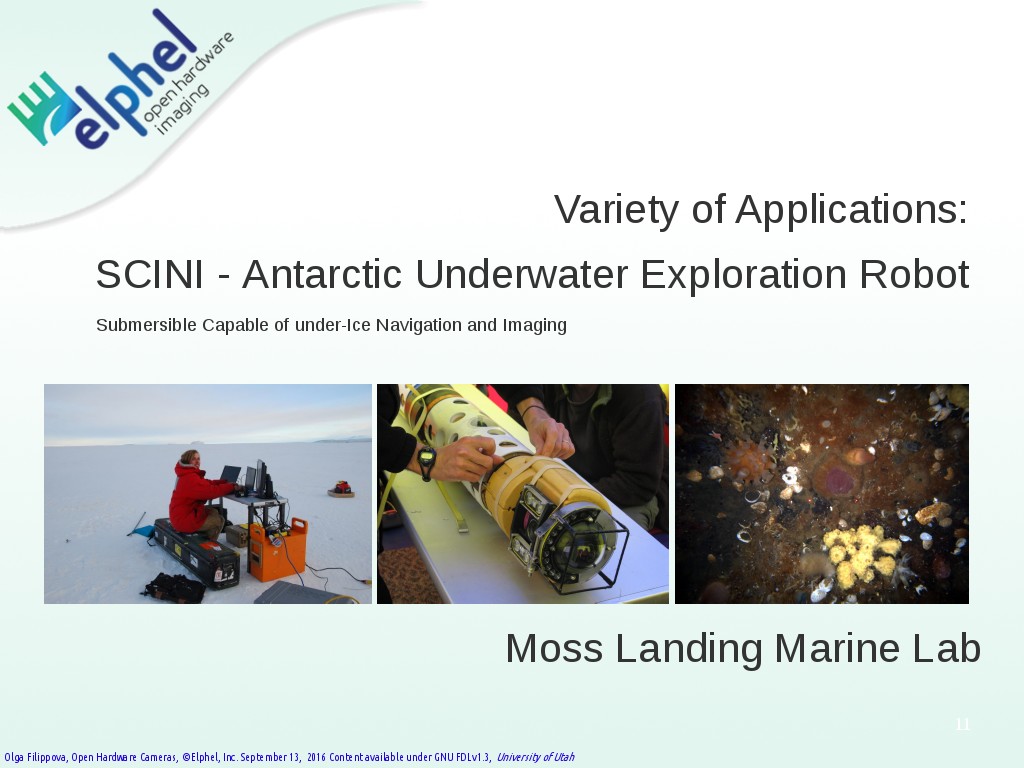
One of the applications is SCINI project. It's an underwater robot designed by Moss Landing Marine Lab for observing the life under the Antarctic ice.
In the robot they used 2 cameras – one is set to a higher frame rate and lower resolution for navigation, and another - for taking high resolution photographs.
It is enough to drill a 20 cm. hole in the 6 meter thick ice using hand-held Jiffy ice drills, which allows research teams to survey many areas during their short field season.
Engineers of the lab developed the robot and integrated our open hardware with minimal technical support from our side, because the camera is open for modifications and documentation is available.