





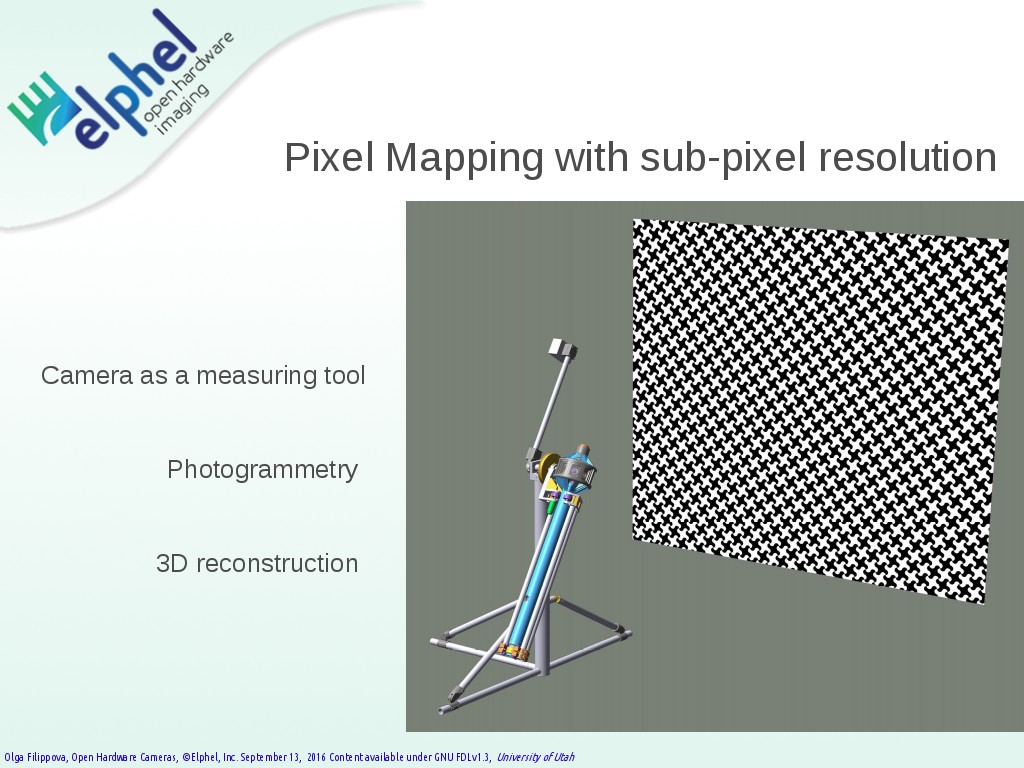
Goniometer machine rotates camera along 2 axises w/ precise angle, taking about 1500 images of the pattern.
Taking into account about 1000 different parameters (position and orientation of each lens, actual focal length of each lens, it's distortions, shift from the center of the sensor, etc.) the program determines coordinates of each node (intersection on the pattern).
Then we create a virtual image of the pattern based on approximate camera parameters and adjust it with the actual image. No actual images are alligned, but the X and Y coordinates of the nodes.
Later the pattern's 3D parameters (it is not idealy flat) are also taken into calculations and corrected for.
This calibration is perfomed by ~100,000 lines og code in Java program for ImageJ.
Goniometer machine callibrates the camera for:
1) abberations and distortions;
2) provide lens module orientation relative to the whole camera;
3) using the color test chart we can also perform flat field correction.
4)Along with optical calibration we will calibrate the IMU